

News
氣候變化、殺蟲劑使用(yòng)量的增加、栖息地的喪失以及許多(duō)其他(tā)原因正在使蜜蜂、蝴蝶和其他(tā)重要授粉者的數量面臨極大的風險。這也将意味着在不久的将來出現糧食..和糧食短缺的風險。
這促使技(jì )術部門和工(gōng)程師們開始嘗試各種方法來适當模仿授粉者的作(zuò)用(yòng),從而替代或抵消自然和本地授粉物(wù)種的減少。雖然這種想法已經存在多(duō)年,美國(guó)國(guó)家公(gōng)共廣播電(diàn)台(NPR)也報道過這種單個機器蜜蜂的設計,但這種裝(zhuāng)置的實用(yòng)性往往是一個主要的症結所在,因為(wèi)它遇到了成本效益、模仿能(néng)力和可(kě)擴展性等問題。不過,西弗吉尼亞大學(xué)的研究人員認為(wèi),他(tā)們的.新(xīn)設計取得了突破,這是一種..授粉機器人,他(tā)們稱之為(wèi) “Stickbug”。
Stickbug:專為(wèi)溫室設計
“Stickbug ”有(yǒu)别于以往的機器人授粉機,它采用(yòng)了多(duō)代理(lǐ)設計,“将單代理(lǐ)系統的..性與溫室中(zhōng)的蜂群并行化相結合”。通過這種方式,自主機器人的六隻手臂各自獨立運作(zuò),不僅降低了規劃的複雜性,還提高了任務(wù)效率和授粉産(chǎn)量。
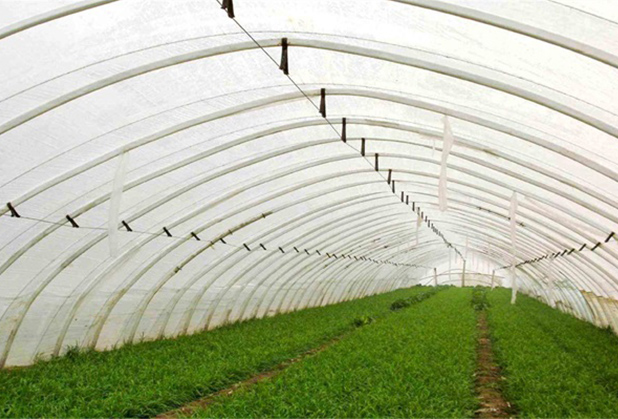
與過去的機器人授粉機相比,Stickbug的設計獨特之處還在于它是專為(wèi)在溫室環境中(zhōng)工(gōng)作(zuò)而設計的。這是通過一個緊湊的整體(tǐ)工(gōng)程學(xué) Kiwi 驅動器實現的,該驅動器使機器人能(néng)夠在狹窄的行間穿梭,并與一個檢測模型和分(fēn)類器相配合,以識别需要接觸式授粉的花(huā)朵。然後使用(yòng) “氈尖末端執行器 ”開始授粉過程。
在對Stickbug原型進行測試時,研究人員将機器人分(fēn)配到一株人造荊棘植物(wù)上,要求它在5分(fēn)鍾内為(wèi)盡可(kě)能(néng)多(duō)的花(huā)朵授粉。研究報告的作(zuò)者稱:初步實驗驗證表明,Stickbug每分(fēn)鍾可(kě)嘗試1.5次以上的授粉,成功率達 50%。
機器人授粉器的未來
雖然取得了可(kě)喜的成果,但研究人員指出,Stickbug還有(yǒu)很(hěn)多(duō)工(gōng)作(zuò)要做。他(tā)們計劃在花(huā)季進行後續實驗,這次将使用(yòng)活體(tǐ)植物(wù)。這是因為(wèi).初研究的一個主要限制因素是“由于授粉季節較短,無法使用(yòng)真實的花(huā)朵進行實驗。”
此外,研究人員還計劃通過整合搜索功能(néng)和花(huā)卉負載平衡來增強操縱器的能(néng)力,并将其投入未開發的花(huā)卉密集區(qū)域進行實驗。

















 當前位置:
當前位置:
 熱門推薦
熱門推薦





